

รายละเอียดสินค้า
| ข้อมูล |
น้ำหนัก
บาร์โค้ด
ลงสินค้า
อัพเดทล่าสุด
|
| รายละเอียดสินค้า |
รายละเอียดสินค้า
วิธีการต่อวงจรแบบ I2C (ตำแหน่งขาอาจไม่ตรงกัน ให้ดูที่สัญลักษณ์เป็นหลัก) 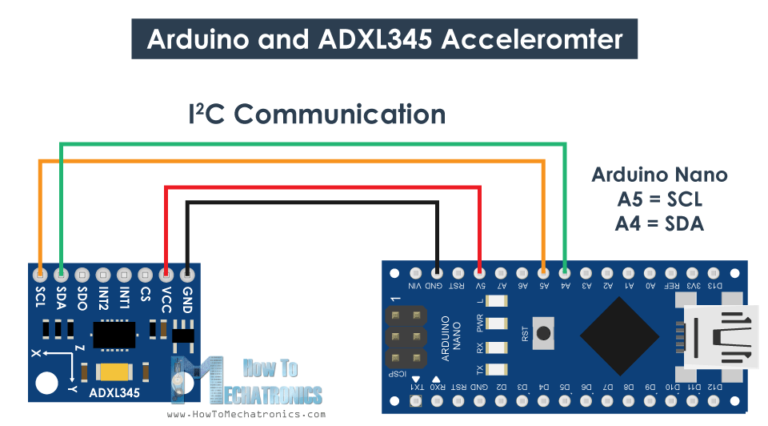 ตัวอย่าง Code /* Arduino and ADXL345 Accelerometer Tutorial www.arduinoNa.com */ #include <Wire.h> // ไลบรารี่ที่ใช้กับการสื่อสารแบบ I2C int ADXL345 = 0x53; // ตำแหน่ง Address บนบัส I2C ของ ADXL345 float X_out, Y_out, Z_out; // ค่าที่ได้รับแต่ละแกน void setup() { Serial.begin(115200); Wire.begin(); // ใช้ I2C ต้องมีการเริ่มด้วยบรรทัดนี้ทุกครั้ง // เริ่มอ่านค่า ADXL345 Wire.beginTransmission(ADXL345); // เริ่มสื่อสาร Wire.write(0x2D); // สั่งให้ register POWER_CTL - 0x2D Wire.write(8); // (8dec -> 0000 1000 binary) เซ็ตบิต 3 เพื่อเริ่มวัดค่า Wire.endTransmission(); delay(10); } void loop() { // === อ่านค่า acceleromter data === // Wire.beginTransmission(ADXL345); Wire.write(0x32); // เริ่มจาก register 0x32 (ACCEL_XOUT_H) Wire.endTransmission(false); Wire.requestFrom(ADXL345, 6, true); // สั่งให้อ่าน 6 registers, โดยแต่ละแกนใช้ 2 registers X_out = ( Wire.read()| Wire.read() << 8); // X-axis value X_out = X_out/256; //สำหรับช่วง +-2g ตาม datasheet ค่าที่ได้ต้องหารด้วย 256 Y_out = ( Wire.read()| Wire.read() << 8); // Y-axis Y_out = Y_out/256; Z_out = ( Wire.read()| Wire.read() << 8); // Z-axis Z_out = Z_out/256; Serial.print("Xa= "); Serial.print(X_out); Serial.print(" Ya= "); Serial.print(Y_out); Serial.print(" Za= "); Serial.println(Z_out); } รายละเอียดเพิ่มเติม 1. On-board ADXL345 digital output (supports I2C / SPI), low power consumption, compact acceleration sensor; 2. Support 5V / 3.3V voltage input, on-board RT9161 power chip, lower voltage drop than 1117, faster load corresponding speed, very suitable for high noise power environment;
3. The commonly used pins have been led out, and the pins are standard 100mil (2.54mm), which is convenient for dot matrix boards;
4. PCB size: 28 (mm) x14 (mm)
5. Post-purchase test procedures and related information 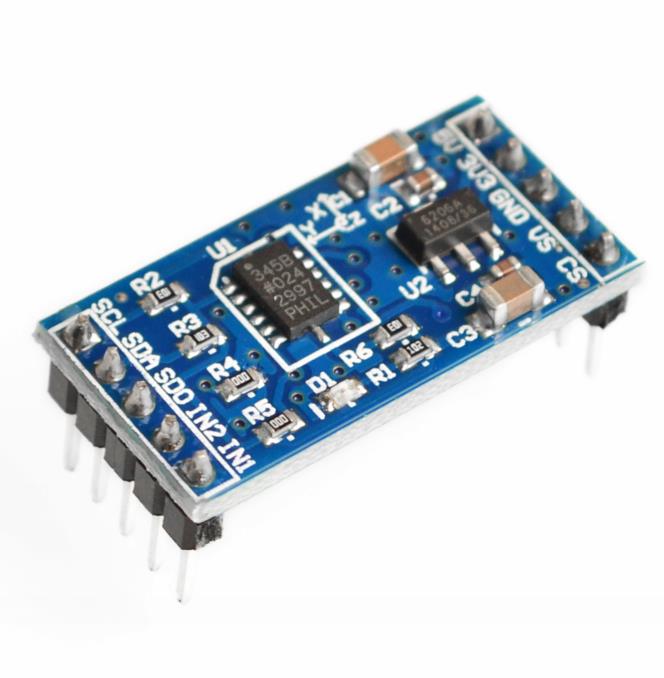 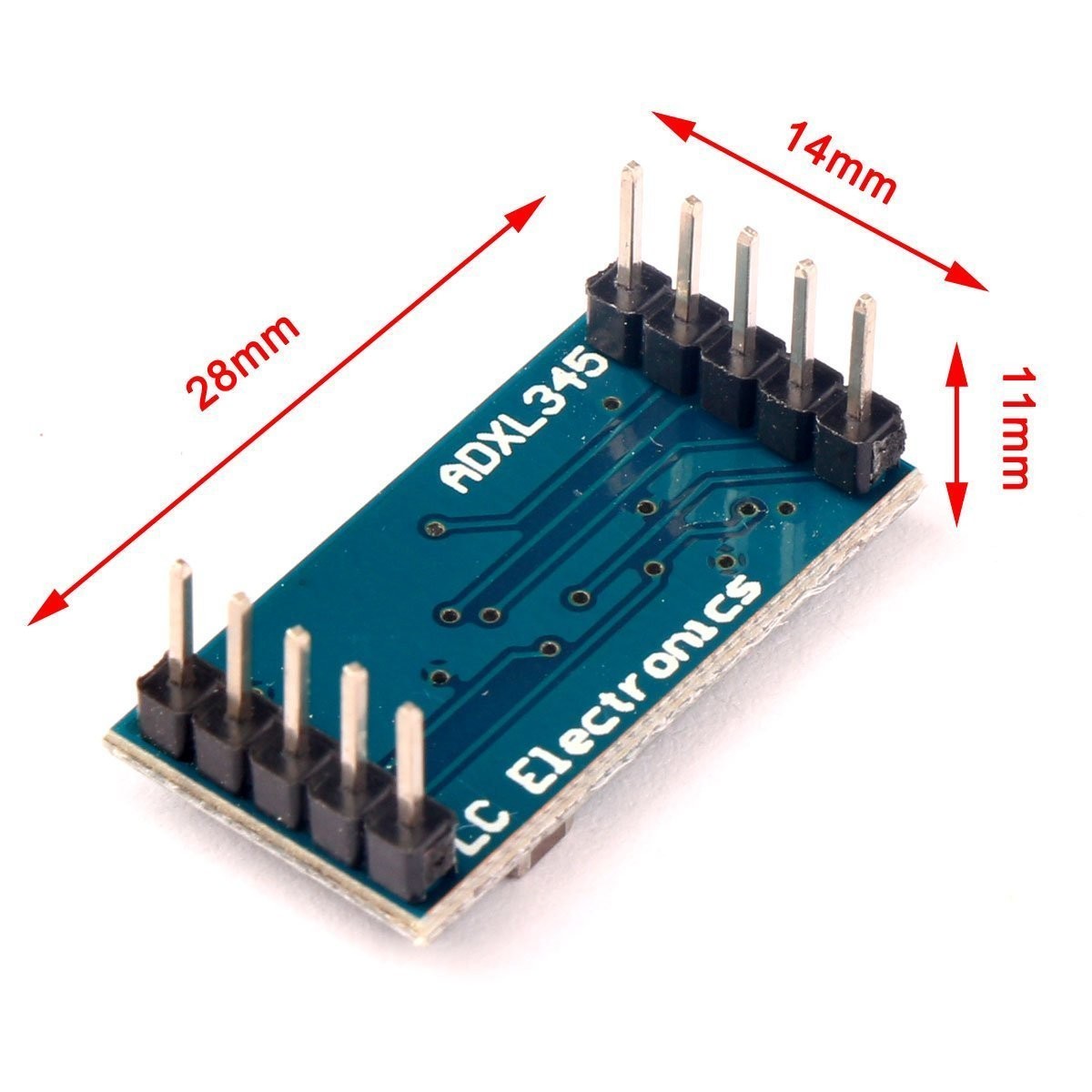 |
| เงื่อนไขอื่นๆ |
|
| Tags |
นโยบายการเปลี่ยนหรือคืนสินค้า
สินค้าทุกชิ้นมีการรับประกัน 30 วันครับ
โดยมีเงื่อนไขต่างๆดังนี้
1. ลูกค้าไม่ได้เป็นผู้ทำเสียหายเอง อาธิเช่น การต่อไฟเลี้ยงไม่ถูกต้อง (เซนเซอร์รับ 3.3v เราใส่ 5v อันนี้ไม่ได้เนอะ)
2. สินค้าต้องอยู่ในสภาพสมบูรณ์ ไม่แตกหักหรือเสียหายจากไฟ (เช่นไฟฟ้าลัดวงจรจนไฟไหม้)
3. ทางร้านไม่รับเปลี่ยนสินค้าจากความเข้าใจผิดของลูกค้าเอง เช่น ขนาดไม่ตรงกับงานที่ใช้, หรือซื้อไว้แต่ไม่ได้ใช้งาน เป็นต้น ลูกค้าสามารถสอบถามข้อมูลสินค้าหากมีความคลุมเครือก่อนสั่งซื้อได้ในไลน์ร้าน @modulemore ตลอดวันทำการ ยกเว้นเวลา 12.00-14.00 ที่อาจมีการตอบช้าในช่วงนี้
การส่งคืนสินค้า
การส่งคืนสินค้าจำเป็น ต้องมีใบเสร็จหรือสำเนา เพื่อความรวดเร็วในการตรวจสอบครับ
สามารถส่งคืนได้ผ่านที่อยู่ของร้าน คลิ๊ก โดยเขียนเป็นลายลักษณ์อักษรกำกับดังนี้
1. รายละเอียดรายการเสียหาย
2. ลูกค้าได้ทดสอบอะไรไปบ้าง
ทางร้านขอสงวนสิทธิ์ในการตัดสินใจเปลี่ยนสินค้าหรือคืนเงินครับ
ไทย▾


MEMBER ZONE

JOIN US
ร้านโมดูลมอร์
/www.modulemore.com/
สมัครสมาชิกร้านนี้ เพื่อรับสิทธิพิเศษ






Special thanks very good images from Freepik
ไทย▾
Choose your language
Language
Currency
Change
เปลี่ยนภาษา
▲
▼
รายการสั่งซื้อของฉัน
รายการสั่งซื้อของฉัน
ข้อมูลร้านค้านี้

โมดูลมอร์
ขาย arduino, diy, เรียน arduino, ทำหุ่นยนต์, ฝึกเขียนโปรแกรม, ตั้งแต่ระดับเริ่มต้นจนชำนาญ
เบอร์โทร : 0831710868
อีเมล : modulemore@gmail.com
อีเมล : modulemore@gmail.com
ส่งข้อความติดต่อร้าน
เกี่ยวกับร้านค้านี้
ค้นหาสินค้าในร้านนี้
ค้นหาสินค้า
สินค้าที่ดูล่าสุด
บันทึกเป็นร้านโปรด
Join เป็นสมาชิกร้าน
แชร์หน้านี้
แชร์หน้านี้
↑
TOP เลื่อนขึ้นบนสุด
TOP เลื่อนขึ้นบนสุด
สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
รวมภาษีมูลค่าเพิ่มแล้ว
➜ เลือกซื้อสินค้าเพิ่ม