

รายละเอียดสินค้า
| ข้อมูล |
น้ำหนัก
บาร์โค้ด
ลงสินค้า
อัพเดทล่าสุด
|
||||||||||||||||||||
| รายละเอียดสินค้า |
IOE-SR05 Ultrasonic Ranging Module Features: 1. Small size, PCB board size is only 2.2*3.6CM , suitable for occasions with high size requirements; 2. At least one IO data port can accept the hexadecimal data of the measured distance; with a data output enable terminal, it can be controlled through the IO port or directly grounded! 3. The measurement distance cycle is only 18ms , which greatly reduces the measurement time, especially suitable for robot control; 4. It has reached the theoretical no-blind zone, which is basically the test range of no-blind zone; 5. Automatically return the AAAA data over the range to reduce the waiting time after the over-range; 6. There is a red LED on the back to indicate the working status. When there is an obstacle, the LED will light up. Ultrasonic ranging module wiring method: 5 2.54mm pitch pins: VCC - wide voltage input: support 3v-5.5v TxD——(Serial output, connect to RXD of microcontroller or TTL small board;) Enable—— (enable terminal, module works when = 0, does not work when = 1, PCB prints Trig), GND - power ground wire GND - power ground wire Data Format: The module outputs 4 bytes each time, the format is: 0XFF+H_DATA+L_DATA+SUM 1. 0XFF : It is a group of start data for judgment. 2. H_DATA : The upper 8 bits of the distance data. 3. L_DATA : The lower 8 bits of the distance data. 4. SUM: Sum of data, used for validation. Its 0XFF+H_DATA+L_DATA=SUM (only lower 8 bits) Note: H_DATA and L_DATA synthesize 16-bit data, that is, the distance value in millimeters.
H_DATA * 256 +L_DATA Overrange fixed output: FF AA AA 53 There is a red LED on the back to indicate the working status, when there is an obstacle, the LED will light up. Electrical parameters:
How to use this product: After confirming that the polarity and voltage of the power supply are connected, the module will automatically measure with a cycle of 18ms. If an echo is received, the protocol data containing the distance information (in mm) will be output through TXD. After actual testing, The output is very stable. How the module works: (1) The module automatically sends 8 square waves of 40khz with a cycle of 18ms, and automatically detects whether there is a signal return; (2) There is a signal returned, after the internal calculation and processing, the distance information is output through TXD; Main features of the module: (1) Ultra-miniature, only equivalent to two transmitters, the area of the receiving head cannot be any smaller. (2) No blind area (the error of forming a triangle within 12mm is large). (3) The response speed is fast, and the measurement period of 18ms is not easy to lose the high-speed target. (4) The transmitting head and the receiving head are close to each other, and are basically in a linear relationship with the measured target (it is still a large triangle within 12mm, this is the transmission, and the physical shape of the receiving head determines). (5) There are LED indications on the module, which is convenient for observation and testing! Frequently Asked Questions (faq): 1: Principle of ultrasonic ranging Ultrasound is a sound with a relatively high frequency and strong directivity. The principle of ultrasonic ranging is to use the propagation speed of ultrasonic waves in the air to be known to measure the time when the sound waves are reflected from obstacles after being transmitted. Calculate the actual distance from the launch point to the obstacle. It can be seen that the principle of ultrasonic ranging is the same as that of radar. Ultrasonic propagation speed error 2: Why is the farthest distance only 2000mm? This sensor is specially designed for miniature devices such as smart cars. It is suitable for small areas, small spaces, and closed spaces. As we all know, the ultrasonic transmission speed is low and the decay time is long. If you blindly pursue distance, it will lead to long response time and loss of target. , In closed places such as indoors, multiple emission oscillations will be formed, and the sensor will not work properly. The following is an analysis of the distance problem from the response time of the sensor: The speed of the ultrasonic wave in air is about 340 meters per second, which is converted into milliseconds, which is 340mm/ms. If the detection distance is 2000mm, the distance of the detected echo is 4000mm, and the transmission time of the ultrasonic wave is 12ms, plus the circuit delay, the energy delay of the sensor , and then reserve some protection time (to make the last ultrasonic energy disappear), each measurement time is 18ms. The response speed of 18ms is suitable for the smart car, and the target will not be lost when moving at high speed. Now there is a sensor on the market that is 5 meters, and this 5 meters is the maximum distance. The detection target is generally a large emitting surface such as a wall. It is impossible to reach a small target. No matter how far the small target is, we start from the sensor The response time of this sensor is different from ours. It first receives feedback and then feeds back from the pulse width of the Echo, rather than the time difference between the echo and the trigger, so that the sensor's response The time has been doubled! In this way, the response time of the 5-meter sensor is at least (the minimum time for 1 meter calculated above is 6ms): 5*6*2=60ms! Too sluggish! When the main control CPU detects the target, the car may have hit it! 3: Your ultrasonic transmitter and receiver are very close, why? The ultrasonic sensors that you have seen are generally separated from the transmitting and receiving heads, because the closer to the transmitting head, the higher the transverse wave energy is transmitted to the receiving head, resulting in a large blind spot, or even unable to work normally, allowing the transmission The separation point between the head and the receiving head cannot be done. The disadvantage of this is that the transmitting head, the receiving head and the measuring object are connected by a triangle! Obviously, the closer the distance, the larger the angle of the triangle, which brings The error is wrong. The transmitter and receiver of our sensor are close together, and they are in a parallel relationship with the detection target, not a triangular relationship. 4: Is your ultrasonic module really free of blind spots? This ultrasonic sensor uniquely eliminates lateral interference waves, and the minimum measurement distance starts from 0. 5: Different objects measure different distances? Yes! Because ultrasound is sound with higher frequency, different materials and shapes of objects have different absorption rates of sound and different reflection angles. Only the energy reflected to the receiving head (that is, the direction of ultrasonic emission) will be detected, so The effective measurement distances for different objects are different. Generally speaking, flat and smooth objects (such as mirror surfaces) have the farthest reflection distance. Usually, the maximum detection distance refers to such objects. The detection distance of small objects is very close, such as thin objects. Cotton threads, which are small in size and absorb sound, cannot be detected. The following lists the maximum detection distance of actual objects: 1. Ballpoint pen, 200mm 2. Hand, 400mm 3.1mm thick wire with plastic sleeve, 30mm 4. Vernier caliper, 450mm 5. Human body (wear thick clothes), 400mm 6. Wall, 2.200mm (maximum about 2300mm, need to measure vertically) 7.1mm thick cotton thread, undetectable 8. Bamboo toothpick, 40mm 6: Is there an application routine? Yes, use the serial port of 51 single-chip microcomputer to receive the output information of the module #include "reg51.h" unsigned char head,dh,dl,sum; head = com_getchar(); if (head != 0xff) continue; dh = com_getchar(); dl = com_getchar(); sum = com_getchar(); head = head + dh + dl; if (head != sum) continue; //sum check error ...now dh * 256 + dl is the measured distance value, and then do further processing... 7: IO is tight, can you use less IO? In serial mode, only two IOs are used. The module does not receive data, but only sends. If less IO is required, the microcontroller can use only one RXD. At the same time, Enable is directly connected to GND (the module always works) 8: Need a shorter period of measurement, is it possible? No, the module automatically measures at a cycle of 18ms. 9: How about anti-interference? The anti-interference performance is relatively strong. There are several measures in the design: 1. Try to reduce the input impedance, the higher the impedance, the easier it is to introduce interference; 2. The distance of the module design is relatively close, and the signal amplification factor only meets this distance; 3. General interference source The closer it is to the module, the easier it is to interfere. The module attenuates the signal at close range. After the actual test, the module does not interfere with the noise (high five, whistle, audio speaker) at close range, but strong mechanical vibration sometimes occurs. interference (with strong harmonics, including 40khz components), so the ultrasonic module avoids hard connection with objects that may generate vibration, and can use rubber or other shock absorbers in the middle, so that it can work reliably. 10: Detection angle? The short-range detection angle is relatively large, about 60 degrees, the longer the distance, the smaller the detection angle, and the farthest is close to 0 degrees. 11: Does the module have other interface methods? Yes. There is another IO mode. Others such as IIC and SPI can be customized, but the most commonly used are IO and TTL interface methods, please consult the owner for details. 12: Can this module be used on a PC? Yes. You can directly connect this module with a USB to TTL serial port cable (the RS232 serial port cannot be used, the level is different, and it will burn out when used, and the current PC does not have an RS232 serial port), and the module directly uses the USB power supply, which is very convenient. Please ask the owner for the usage and USB serial cable  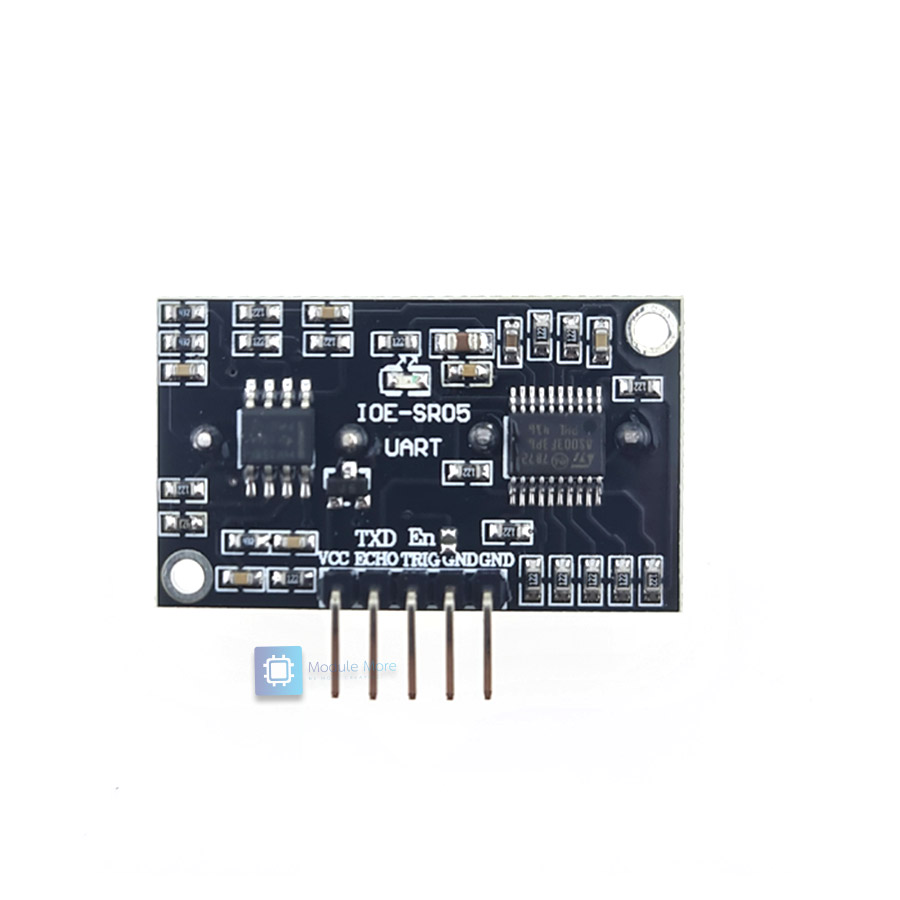 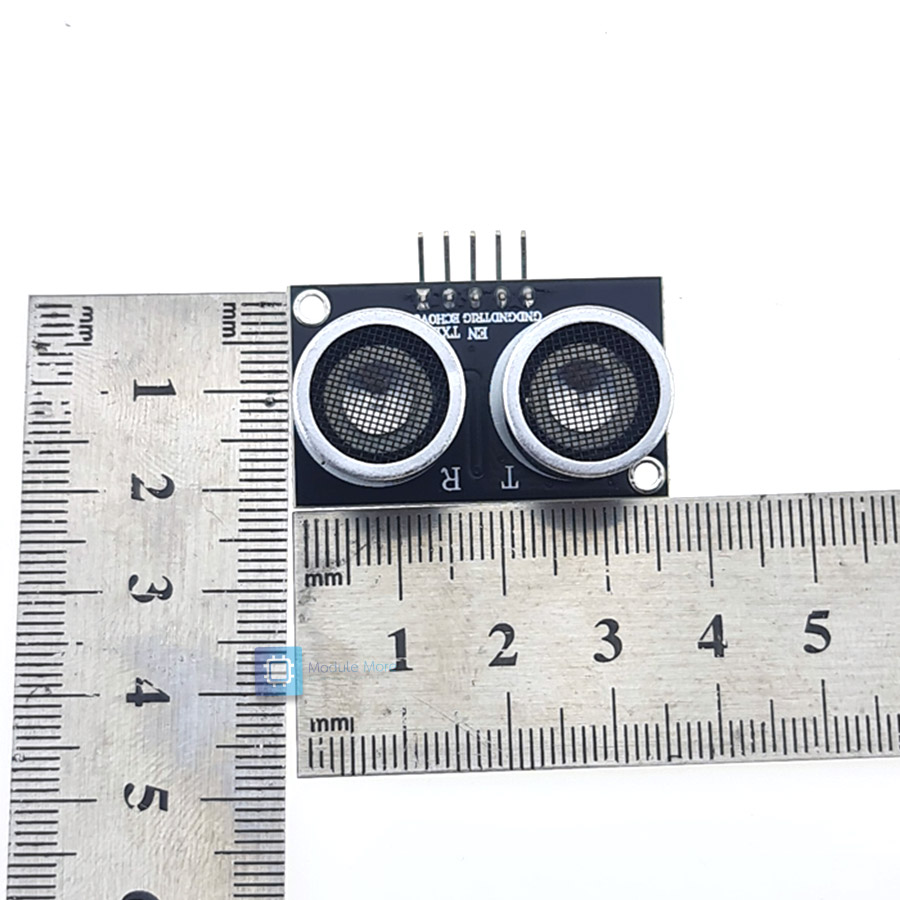 |
||||||||||||||||||||
| เงื่อนไขอื่นๆ |
|
||||||||||||||||||||
| Tags |
นโยบายการเปลี่ยนหรือคืนสินค้า
สินค้าทุกชิ้นมีการรับประกัน 30 วันครับ
โดยมีเงื่อนไขต่างๆดังนี้
1. ลูกค้าไม่ได้เป็นผู้ทำเสียหายเอง อาธิเช่น การต่อไฟเลี้ยงไม่ถูกต้อง (เซนเซอร์รับ 3.3v เราใส่ 5v อันนี้ไม่ได้เนอะ)
2. สินค้าต้องอยู่ในสภาพสมบูรณ์ ไม่แตกหักหรือเสียหายจากไฟ (เช่นไฟฟ้าลัดวงจรจนไฟไหม้)
3. ทางร้านไม่รับเปลี่ยนสินค้าจากความเข้าใจผิดของลูกค้าเอง เช่น ขนาดไม่ตรงกับงานที่ใช้, หรือซื้อไว้แต่ไม่ได้ใช้งาน เป็นต้น ลูกค้าสามารถสอบถามข้อมูลสินค้าหากมีความคลุมเครือก่อนสั่งซื้อได้ในไลน์ร้าน @modulemore ตลอดวันทำการ ยกเว้นเวลา 12.00-14.00 ที่อาจมีการตอบช้าในช่วงนี้
การส่งคืนสินค้า
การส่งคืนสินค้าจำเป็น ต้องมีใบเสร็จหรือสำเนา เพื่อความรวดเร็วในการตรวจสอบครับ
สามารถส่งคืนได้ผ่านที่อยู่ของร้าน คลิ๊ก โดยเขียนเป็นลายลักษณ์อักษรกำกับดังนี้
1. รายละเอียดรายการเสียหาย
2. ลูกค้าได้ทดสอบอะไรไปบ้าง
ทางร้านขอสงวนสิทธิ์ในการตัดสินใจเปลี่ยนสินค้าหรือคืนเงินครับ
ไทย▾


MEMBER ZONE

JOIN US
ร้านโมดูลมอร์
/www.modulemore.com/
สมัครสมาชิกร้านนี้ เพื่อรับสิทธิพิเศษ






Special thanks very good images from Freepik
ไทย▾
Choose your language
Language
Currency
Change
เปลี่ยนภาษา
▲
▼
รายการสั่งซื้อของฉัน
รายการสั่งซื้อของฉัน
ข้อมูลร้านค้านี้

โมดูลมอร์
ขาย arduino, diy, เรียน arduino, ทำหุ่นยนต์, ฝึกเขียนโปรแกรม, ตั้งแต่ระดับเริ่มต้นจนชำนาญ
เบอร์โทร : 0831710868
อีเมล : modulemore@gmail.com
อีเมล : modulemore@gmail.com
ส่งข้อความติดต่อร้าน
เกี่ยวกับร้านค้านี้
ค้นหาสินค้าในร้านนี้
ค้นหาสินค้า
สินค้าที่ดูล่าสุด
บันทึกเป็นร้านโปรด
Join เป็นสมาชิกร้าน
แชร์หน้านี้
แชร์หน้านี้
↑
TOP เลื่อนขึ้นบนสุด
TOP เลื่อนขึ้นบนสุด
สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
รวมภาษีมูลค่าเพิ่มแล้ว
➜ เลือกซื้อสินค้าเพิ่ม