

Item description
| Information |
Item weight
Barcode
Created time
Last updated on
|
| Item description |
พินต่างๆบนบอร์ด Monster Moto Shield VNH2SP30
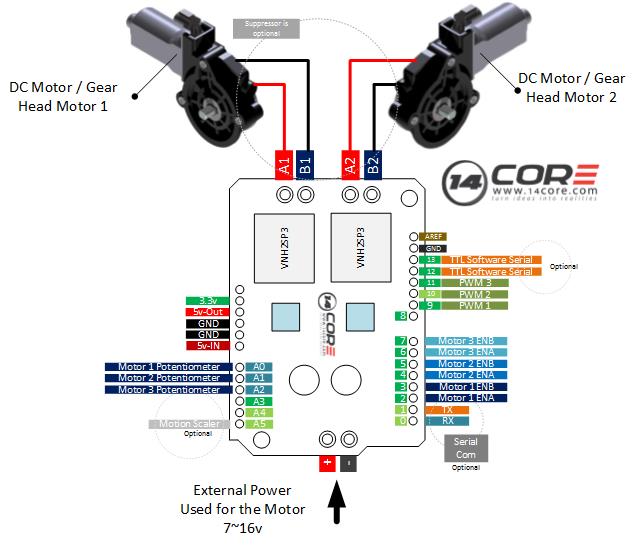 ตัวอย่างวิดีโอการใช้งาน Monster drive VNH2SP30 กับมอเตอร์ 2 ตัว ข้อมูลเพิ่มเติม Datasheet Schematic รายละเอียดเพิ่มเติม High current 30A VNH2SP30 stepper motor drive module High current 30A stepper motor drive Description: This is a module designed for high-horsepower motor drive. The powerful performance of the module makes it only need a pair of VNH2SP30 to replace the L298 H- bridge to provide full-bridge motor drive. At the same time, we have strengthened the load capacity of the circuit to drive it. A pair of high current motors! Both the input end of the module and the motor interface end use 5mm interface terminals, making it convenient to connect large-size wires. When ultra-high current is required, the wires can be directly welded to the module instead of connecting with terminal blocks (as the case may be). When the drive current is greater than 6A , the chip will heat up. In order to improve performance, it is best to connect a heat sink or cooling fan.
Module features:
ตัวอย่าง Code /* MONSTER MOTOR SHIELD TEST CODE www.14core.com / */ #define MtrBrake 0 #define ClockWise 1 #define CClockWise 2 #define GndBreak 3 #define CounterSenseThresHold 100 /* VNH2SP30 pin definitions xxx[0] controls '1' outputs xxx[1] controls '2' outputs */ int inApin[2] = {7, 4}; // INA Clockwise Controll int inBpin[2] = {8, 9}; // INB Counter-clockwise Controll int pwmpin[2] = {5, 6}; // PWM (Pulse with modulation ) Input int cspin[2] = {2, 3}; // CS Current sense for analog input int enpin[2] = {0, 1}; // EN Status of switches output (Analog pin) int statpin = 13; void setup() { Serial.begin(9600); pinMode(statpin, OUTPUT); // Initialize digital pins as outputs for (int i = 0; i < 2; i++) { pinMode(inApin[i], OUTPUT); pinMode(inBpin[i], OUTPUT); pinMode(pwmpin[i], OUTPUT); } // Initialize braked for (int i = 0; i < 2; i++) { digitalWrite(inApin[i], LOW); digitalWrite(inBpin[i], LOW); } // motorGo(0, ClockWise, 255); // motorGo(1, CClockWise, 255); } void loop() { motorGo(0, ClockWise, 255); motorGo(1, CClockWise, 255); delay(500); motorGo(0, CClockWise, 255); motorGo(1, ClockWise, 255); delay(500); if ((analogRead(cspin[0]) < CounterSenseThresHold) && (analogRead(cspin[1]) < CounterSenseThresHold)) digitalWrite(statpin, HIGH); } void motorOff(int motor) { // Initialize the brake for (int i = 0; i < 2; i++) { digitalWrite(inApin[i], LOW); digitalWrite(inBpin[i], LOW); } analogWrite(pwmpin[motor], 0); } /* Monster Motor will set a motor going in a specific direction the motor will continue turns in that direction, at that speed until told to do otherwise. Motor: this should be either 0 or 1 will selet which of the two motors to be controlled Direct Should be between 0 and 3, with the following result 0 - Brake to VCC 1 - Clock wise 2 - Counter Clockwise 3 - Brake to GND PWM (Pulse with Moduleation) should be a value between 0and 1024, higher the number, the faster turns */ void motorGo(uint8_t motor, uint8_t direct, uint8_t pwm) { if (motor <= 1) { if (direct <= 4) { // Set to INA[motor] if (direct <= 1) digitalWrite(inApin[motor], HIGH); else digitalWrite(inApin[motor], LOW); // Set to INB[motor] if ((direct == 0) || (direct == 2)) digitalWrite(inBpin[motor], HIGH); else digitalWrite(inBpin[motor], LOW); analogWrite(pwmpin[motor], pwm); } } }  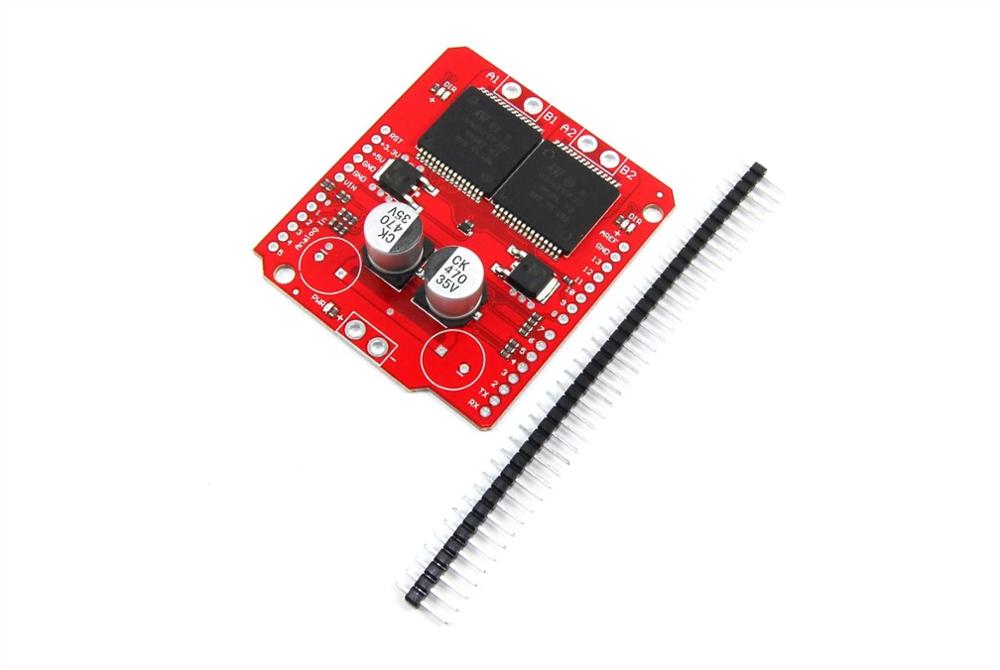  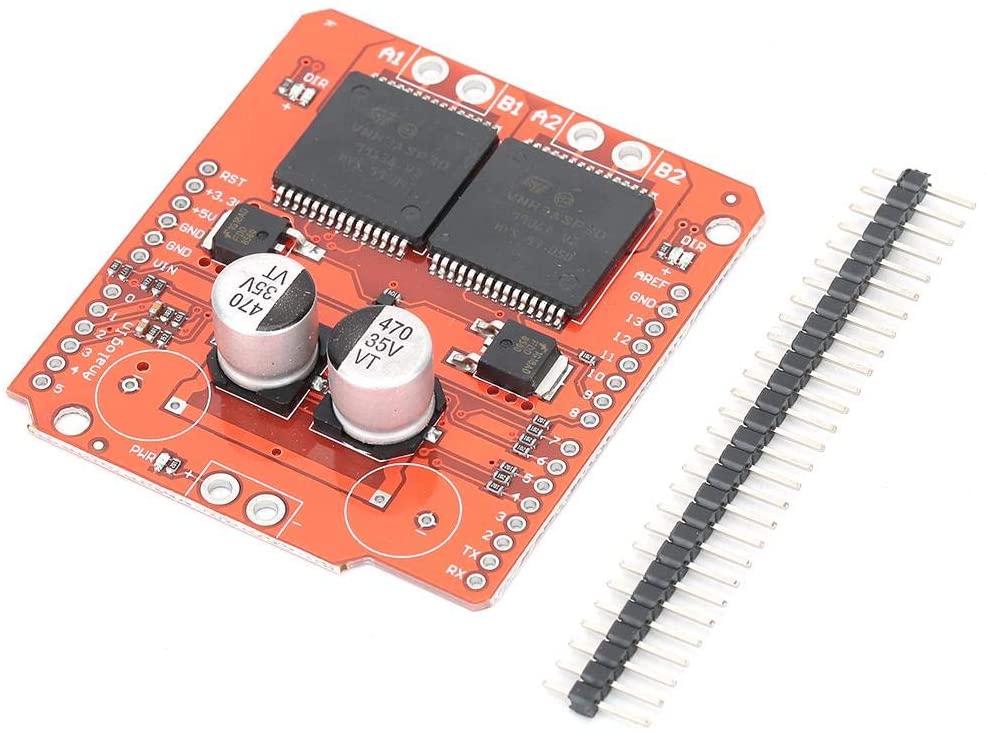 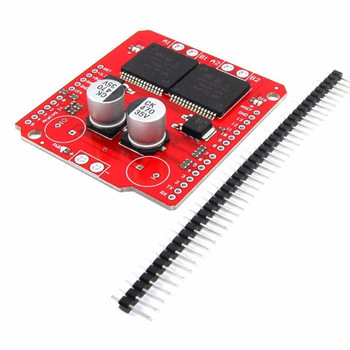 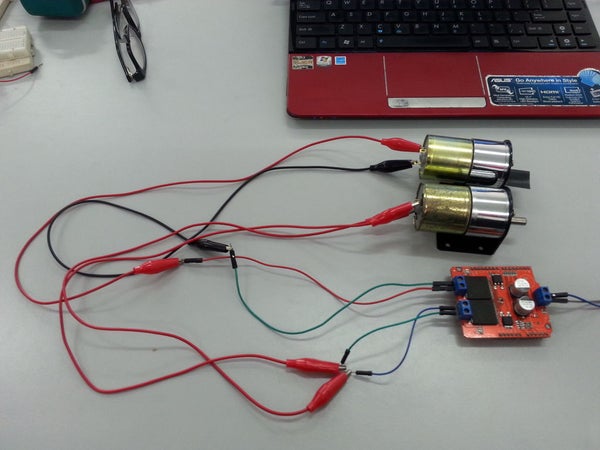 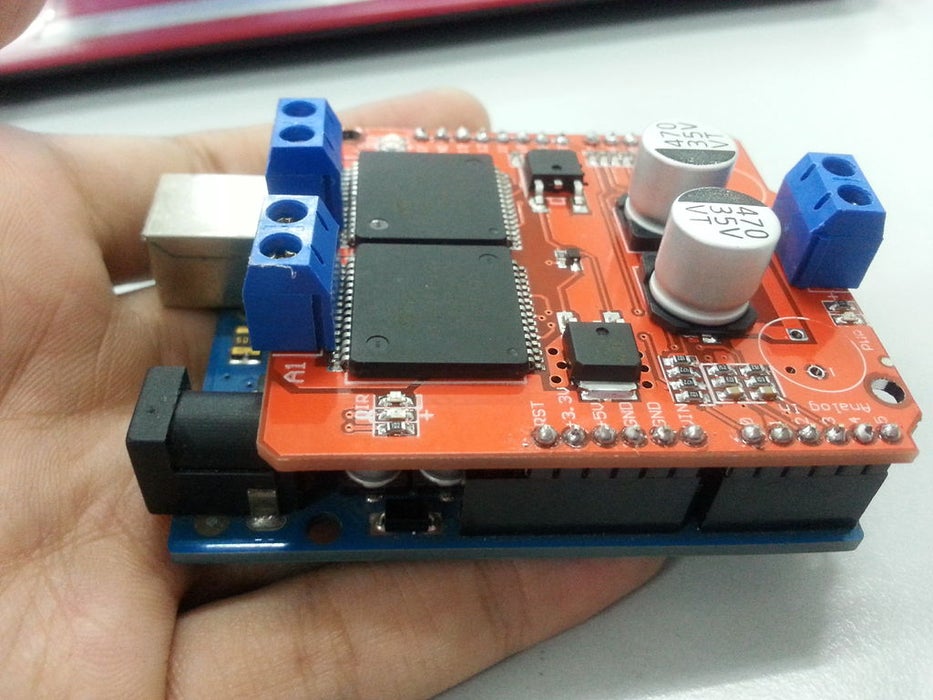 |
| Conditions |
|
| Tags |
Exchange or return policy
Every item comes with a 30-day warranty. However, there are certain conditions that apply:
-
The customer should not be responsible for any self-inflicted damage, such as incorrect power connections (for example, supplying 5V instead of the required 3.3V for a sensor).
-
The product must be in perfect condition, without any breakage or damage caused by electricity (e.g., short circuits leading to electrical fires).
-
The store does not accept product exchanges due to customer misunderstandings, such as purchasing the wrong size for their project or buying something without eventually using it. Customers can inquire about the product details and ensure compatibility before making a purchase by contacting us through our Line account @modulemore during business hours. Please note that there may be delays in response between 12:00 PM and 2:00 PM.
Return Policy: To initiate a product return, customers must provide the original receipt or a copy for quick verification. Returns can be sent to our store address by following these guidelines:
- Provide a detailed description of the damaged item(s).
- Mention any tests or experiments conducted by the customer.
Please note that the store reserves the right to make the final decision regarding product replacement or refund.
English▾


MEMBER ZONE

JOIN US
ร้านModuleMore
/www.modulemore.com/en
Become a member of this store to receive special offers and promotions
 ModuleMore
ModuleMore
Become a member of this store to receive special offers and promotions





Special thanks very good images from Freepik
English▾
Choose your language
Language
Currency
Change
Modify language
▲
▼
My orders
My orders
This seller's information

ModuleMore
Arduino compatible board, Iot, ESP32, ESP8266, Nodemcu, Raspberry pi, micro:bit and etc.
Mobile number : 0831710868
E-mail : paheyisoicus@gmail.com
E-mail : paheyisoicus@gmail.com
Send message to seller
About this seller
Search items from this seller
Search for items
Recently viewed items
Favourite this seller
Join as a Member
Share this page
Share this page
↑
TOP Back to top
TOP Back to top
Items in cart ({{total_num}} type)

We apologise, your cart currently is empty
Total
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
Total
{{total_quantity}} Unit(s)
฿ {{price_format(after_product_price)}}
excluding shipping fee
VAT Included.
➜ Continue shopping