

รายละเอียดสินค้า
| ข้อมูล |
น้ำหนัก
บาร์โค้ด
ลงสินค้า
อัพเดทล่าสุด
|
| รายละเอียดสินค้า |
พินต่างๆบนบอร์ด Monster Moto Shield VNH2SP30
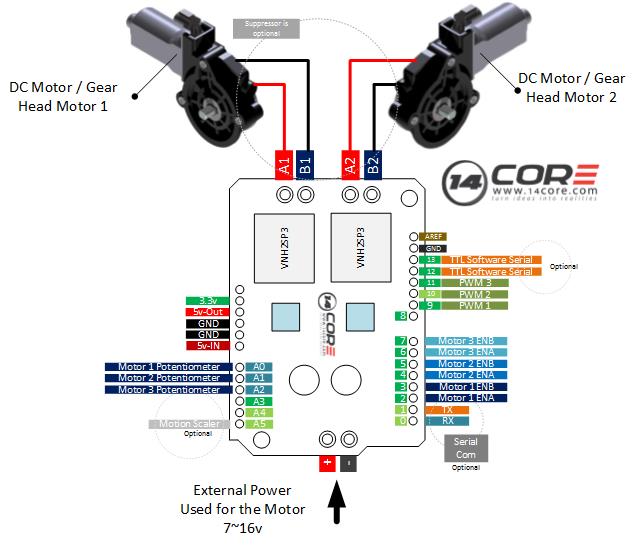 ตัวอย่างวิดีโอการใช้งาน Monster drive VNH2SP30 กับมอเตอร์ 2 ตัว ข้อมูลเพิ่มเติม Datasheet Schematic รายละเอียดเพิ่มเติม High current 30A VNH2SP30 stepper motor drive module High current 30A stepper motor drive Description: This is a module designed for high-horsepower motor drive. The powerful performance of the module makes it only need a pair of VNH2SP30 to replace the L298 H- bridge to provide full-bridge motor drive. At the same time, we have strengthened the load capacity of the circuit to drive it. A pair of high current motors! Both the input end of the module and the motor interface end use 5mm interface terminals, making it convenient to connect large-size wires. When ultra-high current is required, the wires can be directly welded to the module instead of connecting with terminal blocks (as the case may be). When the drive current is greater than 6A , the chip will heat up. In order to improve performance, it is best to connect a heat sink or cooling fan.
Module features:
ตัวอย่าง Code /* MONSTER MOTOR SHIELD TEST CODE www.14core.com / */ #define MtrBrake 0 #define ClockWise 1 #define CClockWise 2 #define GndBreak 3 #define CounterSenseThresHold 100 /* VNH2SP30 pin definitions xxx[0] controls '1' outputs xxx[1] controls '2' outputs */ int inApin[2] = {7, 4}; // INA Clockwise Controll int inBpin[2] = {8, 9}; // INB Counter-clockwise Controll int pwmpin[2] = {5, 6}; // PWM (Pulse with modulation ) Input int cspin[2] = {2, 3}; // CS Current sense for analog input int enpin[2] = {0, 1}; // EN Status of switches output (Analog pin) int statpin = 13; void setup() { Serial.begin(9600); pinMode(statpin, OUTPUT); // Initialize digital pins as outputs for (int i = 0; i < 2; i++) { pinMode(inApin[i], OUTPUT); pinMode(inBpin[i], OUTPUT); pinMode(pwmpin[i], OUTPUT); } // Initialize braked for (int i = 0; i < 2; i++) { digitalWrite(inApin[i], LOW); digitalWrite(inBpin[i], LOW); } // motorGo(0, ClockWise, 255); // motorGo(1, CClockWise, 255); } void loop() { motorGo(0, ClockWise, 255); motorGo(1, CClockWise, 255); delay(500); motorGo(0, CClockWise, 255); motorGo(1, ClockWise, 255); delay(500); if ((analogRead(cspin[0]) < CounterSenseThresHold) && (analogRead(cspin[1]) < CounterSenseThresHold)) digitalWrite(statpin, HIGH); } void motorOff(int motor) { // Initialize the brake for (int i = 0; i < 2; i++) { digitalWrite(inApin[i], LOW); digitalWrite(inBpin[i], LOW); } analogWrite(pwmpin[motor], 0); } /* Monster Motor will set a motor going in a specific direction the motor will continue turns in that direction, at that speed until told to do otherwise. Motor: this should be either 0 or 1 will selet which of the two motors to be controlled Direct Should be between 0 and 3, with the following result 0 - Brake to VCC 1 - Clock wise 2 - Counter Clockwise 3 - Brake to GND PWM (Pulse with Moduleation) should be a value between 0and 1024, higher the number, the faster turns */ void motorGo(uint8_t motor, uint8_t direct, uint8_t pwm) { if (motor <= 1) { if (direct <= 4) { // Set to INA[motor] if (direct <= 1) digitalWrite(inApin[motor], HIGH); else digitalWrite(inApin[motor], LOW); // Set to INB[motor] if ((direct == 0) || (direct == 2)) digitalWrite(inBpin[motor], HIGH); else digitalWrite(inBpin[motor], LOW); analogWrite(pwmpin[motor], pwm); } } }  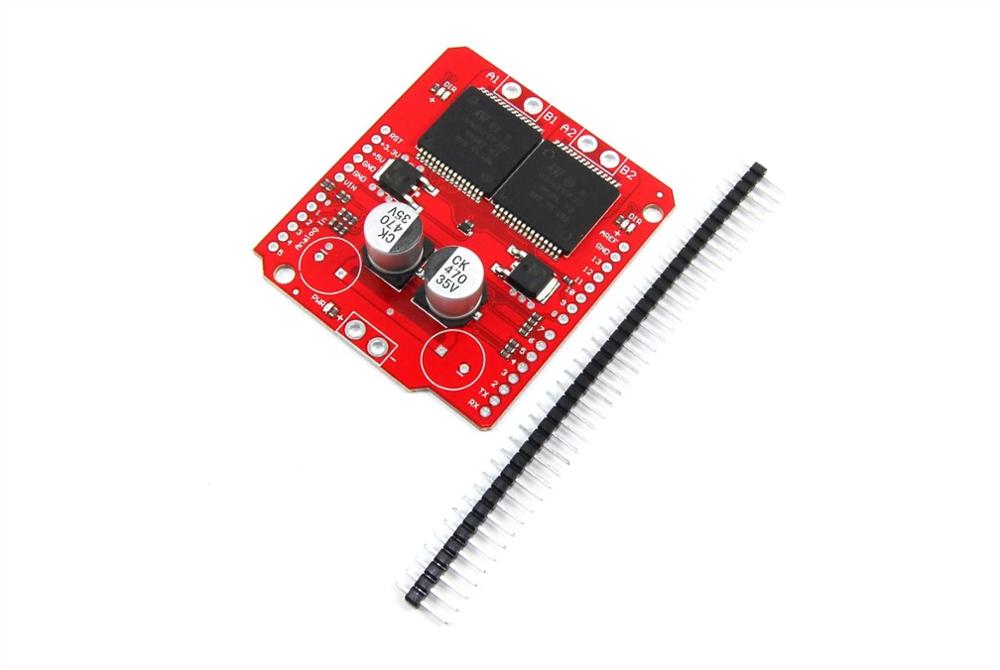  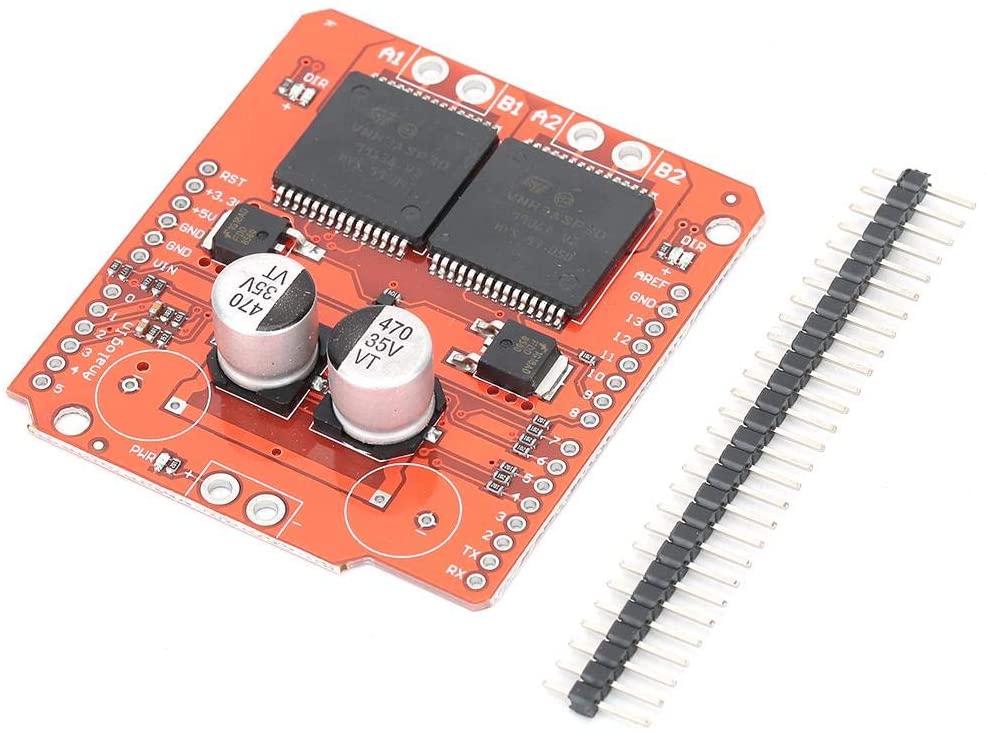 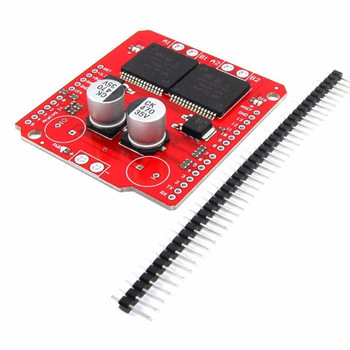 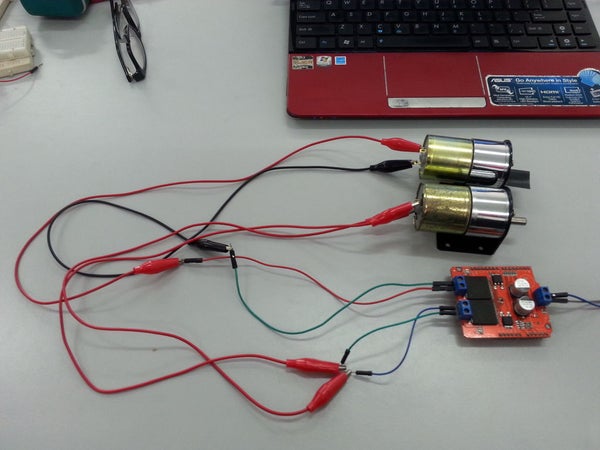 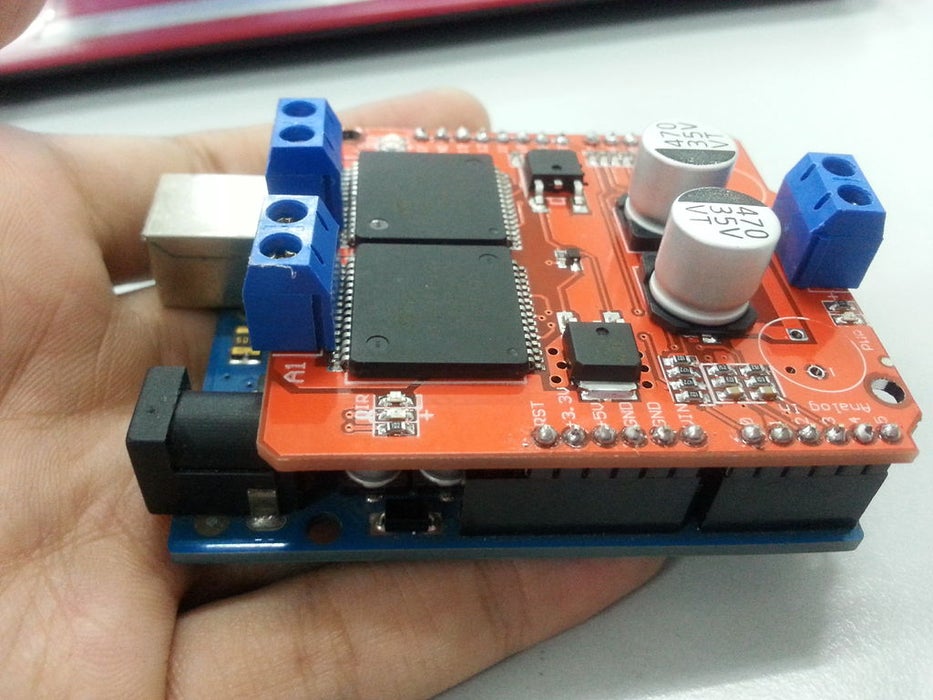 |
| เงื่อนไขอื่นๆ |
|
| Tags |
นโยบายการเปลี่ยนหรือคืนสินค้า
สินค้าทุกชิ้นมีการรับประกัน 30 วันครับ
โดยมีเงื่อนไขต่างๆดังนี้
1. ลูกค้าไม่ได้เป็นผู้ทำเสียหายเอง อาธิเช่น การต่อไฟเลี้ยงไม่ถูกต้อง (เซนเซอร์รับ 3.3v เราใส่ 5v อันนี้ไม่ได้เนอะ)
2. สินค้าต้องอยู่ในสภาพสมบูรณ์ ไม่แตกหักหรือเสียหายจากไฟ (เช่นไฟฟ้าลัดวงจรจนไฟไหม้)
3. ทางร้านไม่รับเปลี่ยนสินค้าจากความเข้าใจผิดของลูกค้าเอง เช่น ขนาดไม่ตรงกับงานที่ใช้, หรือซื้อไว้แต่ไม่ได้ใช้งาน เป็นต้น ลูกค้าสามารถสอบถามข้อมูลสินค้าหากมีความคลุมเครือก่อนสั่งซื้อได้ในไลน์ร้าน @modulemore ตลอดวันทำการ ยกเว้นเวลา 12.00-14.00 ที่อาจมีการตอบช้าในช่วงนี้
การส่งคืนสินค้า
การส่งคืนสินค้าจำเป็น ต้องมีใบเสร็จหรือสำเนา เพื่อความรวดเร็วในการตรวจสอบครับ
สามารถส่งคืนได้ผ่านที่อยู่ของร้าน คลิ๊ก โดยเขียนเป็นลายลักษณ์อักษรกำกับดังนี้
1. รายละเอียดรายการเสียหาย
2. ลูกค้าได้ทดสอบอะไรไปบ้าง
ทางร้านขอสงวนสิทธิ์ในการตัดสินใจเปลี่ยนสินค้าหรือคืนเงินครับ
ไทย▾


MEMBER ZONE

JOIN US
ร้านโมดูลมอร์
/www.modulemore.com/
สมัครสมาชิกร้านนี้ เพื่อรับสิทธิพิเศษ






Special thanks very good images from Freepik
ไทย▾
Choose your language
Language
Currency
Change
เปลี่ยนภาษา
▲
▼
รายการสั่งซื้อของฉัน
รายการสั่งซื้อของฉัน
ข้อมูลร้านค้านี้

โมดูลมอร์
ขาย arduino, diy, เรียน arduino, ทำหุ่นยนต์, ฝึกเขียนโปรแกรม, ตั้งแต่ระดับเริ่มต้นจนชำนาญ
เบอร์โทร : 0831710868
อีเมล : modulemore@gmail.com
อีเมล : modulemore@gmail.com
ส่งข้อความติดต่อร้าน
เกี่ยวกับร้านค้านี้
ค้นหาสินค้าในร้านนี้
ค้นหาสินค้า
สินค้าที่ดูล่าสุด
บันทึกเป็นร้านโปรด
Join เป็นสมาชิกร้าน
แชร์หน้านี้
แชร์หน้านี้
↑
TOP เลื่อนขึ้นบนสุด
TOP เลื่อนขึ้นบนสุด
สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
รวมภาษีมูลค่าเพิ่มแล้ว
➜ เลือกซื้อสินค้าเพิ่ม