

[โปรเจค] ห้องพ่นยาฆ่าเชื้อด้วย dettol antiseptic disinfectant
สวัสดีครับ ห่างหายไปนานสำหรับบทความ ในช่วงวิกฤตการณ์แบบนี้ เราต่างรู้ดีว่าควรต้องอยู่บ้าน แต่ตราบใดที่บางอาชีพยังคงไม่มีมาตรการจัดการ บริษัทก็ยังคงประกอบการปกติ หรือเป็นผู้ที่ไม่ได้อยู่ในข่ายที่ได้รับเงินเยียวยา อาจต้องออกไปข้างนอกบ้าง หรือเป็นการออกไปซื้อของมาตุนไว้กินที่บ้าน ทุกๆนาทีที่อยู่นอกบ้านก็เพิ่มความเสี่ยงที่จะติดเชื้อ แม้ว่าจะใส่หน้ากากอนามัย แต่เชื้อไวรัสสามารถลอยตัวอยู่และติดกลับบ้านมาบนผิวหนังได้ การทำความสะอาดอย่างทั่วถึงด้วยการอาบน้ำจึงเป็นวิธีที่ดีที่สุด แต่หากเราออกบ่อยกว่า 1 ครั้งแบบผมนั้น ตัวคงเปื่อยแน่นอน
ในบทความนี้เลยเสนอโปรเจคไว้ทำเสริมทักษะโดยการใช้งาน NodeMCU คู่กับปั้มน้ำ 12v จ่ายแรงดันน้ำออกไปยังหัวพ่นหมอก เพื่อพ่นทำความสะอาดร่างกายหลังจากกลับมาจากนอกบ้านครับ
อุปกรณ์ที่ต้องใช้
1. โครงสร้าง PVC ออกแบบได้ตามใจชอบ โดยขนาดที่กำลังดีอยู่ที่ 90cm x 90cm x 200cm (งบไม่เกิน 1000 บาท)
2. ตู้ควบคุมขนาดปานกลาง (~250 บาท)
3. ระบบน้ำ (ประมาณ 850 บาท)


4. อุปกรณ์อิเล็กทรอนิกส์

4.15. PCB
4.16. ขาต่อตัวเมีย 6pin
4.17. โมดูลลดแรงดัน 4.75 – 23VDC เป็น 1.0 – 17VDC Mini 360 DC-DC 3A Buck Converter Step Down Module
5. น้ำยาฆ่าเชื้อที่ใช้กับผิวหนังได้ Dettol antiseptic disinfectant (สำคัญ *** สังเกตให้ดีต้องมีมงกุฎด้านบนฉลาก ถึงจะสามารถใช้กับผิวหนังคนได้) (1600B)

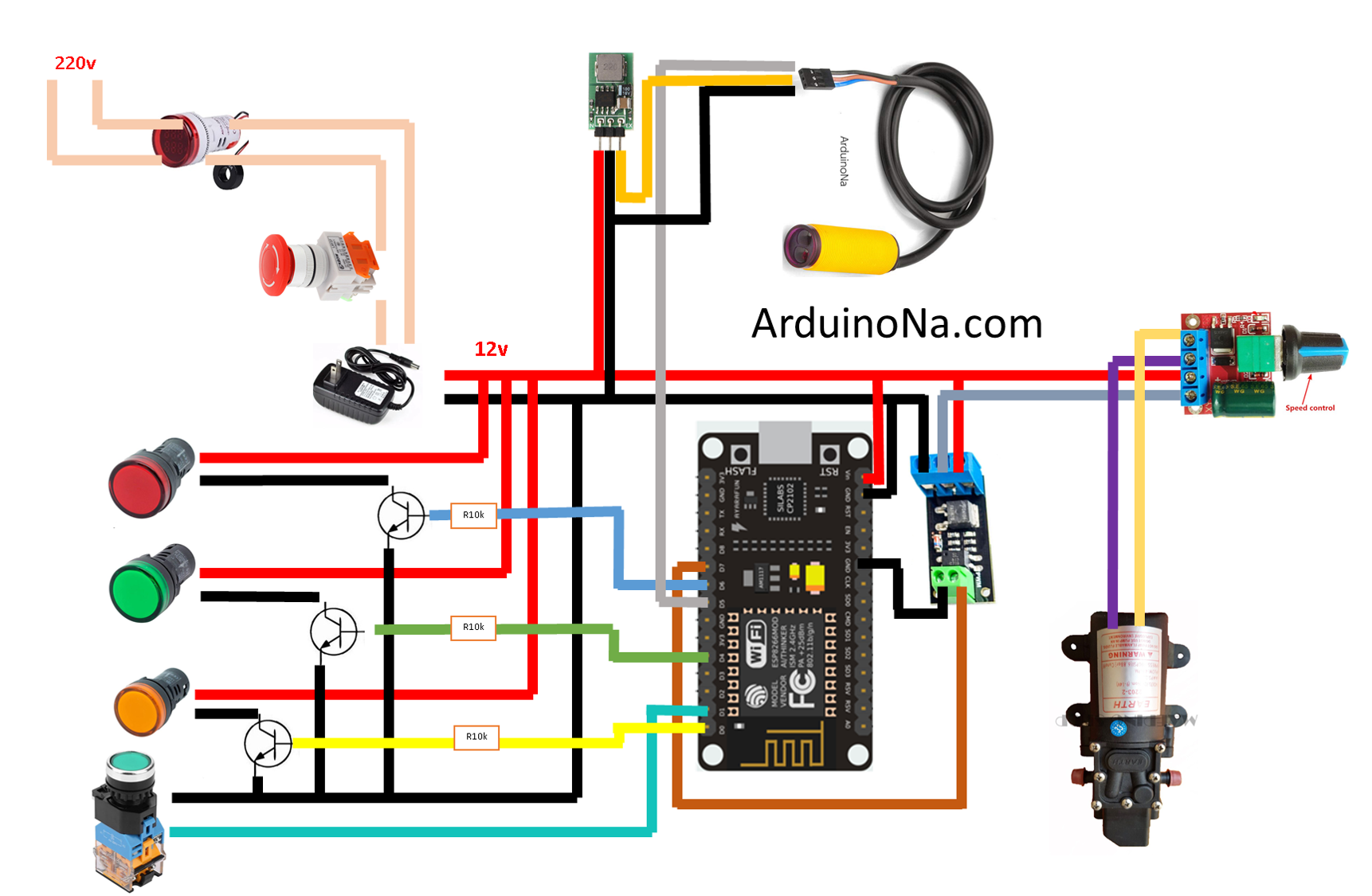
โดยหลักการการทำงานจะใช้ Nodemcu ในการรับค่าเซนเซอร์ Infrared ที่ติดตั้งอยู่ใต้ตู้ Control เพื่อสั่งให้มอเตอร์เริ่มทำงานโดยเปิด Mosfet relay ที่เวลานั้น และดับมอเตอร์ลงเมื่อเวลาผ่านไป 30 วินาที หรือเปิดปิดมอเตอร์โดยการกดปุ่มกดติดกดดับในกรณีต้องการชำระล้างเป็นเวลานานกว่า 30 วินาที
การเลือกปั้มควรเลือกที่เหมาะสมกับหัวพ่นหมอกที่มี โดยปกติหัวพ่นหมอกสแตนเลสจะจ่ายน้ำออกประมาณ 2 ลิตร/ชั่วโมง (l/h) ซึ่งหากปั้มเราที่ทำงานที่แรงดัน 12v มีอัตราการจ่ายน้ำที่ 4 ลิตร ต่อนาที (l/min) หรือ 240 l/hr เราอาจต้องใช้หัวพ่นหมอกจำนวนมากเพื่อไม่ให้เกิดความดันในท่อน้ำเกิน ซึ่งแน่นอนว่าการเพิ่มหัวหมอกนั้นเกินความจำเป็นไปมาก เราจึงจำเป็นต้องลดอัตราการไหลจากการแรงดันจากเดิม 12v ลงมาเหลือเพียงค่าๆนึงที่ทำให้ปั้มน้ำยังทำงานได้และไม่สั่นเพราะความดันเกินในระบบท่อน้ำนั่นเอง
โดยการลดแรงดันจะใช้ Motor speed control มาคั่นไว้ระหว่างมอเตอร์แหละ mosfet relay ซึ่ง mosfet relay จะถูกต่อกับแหล่งจ่ายไฟ 12V และควบคุมโดย Nodemcu นั่นเอง
โดยผังการต่อวงจรเป็นดังนี้
Code การทำงานจะแบ่งไฟล์ออกเป็น 7 ไฟล์ดังนี้
1. anti_covid_control.ino
#include <Arduino.h> #include "config.h" #include "led.h" #include "driver.h" #include "sensor.h" #include "wifi_util.h" #include "state_machine.h" void setup() { drive_init(); console_init(); led_init(); sensor_init(); wifi_init(); Serial.println("Started"); } void loop() { wifi_handle(); if (drive_but_pressed()) { drive_set(HIGH); led_set_r(true); led_set_g(false); } else { if ( sensor_get() && !st_is_holding()) { st_set_holding(); } if (st_is_holding()) { // Serial.println("Drive"); drive_set(HIGH); led_set_g(false); led_flash(LED_R, 500); } else { // Serial.println("Not Drive"); led_set_r(false); led_flash(LED_G, 500); drive_set(LOW); } } }
2. config.h
#define HOLD_SEC 30 void console_init() { Serial.begin(115200); }
3. driver.h
#define DRIVE_PIN 13 #define DRIVE_BUT D1 void drive_init() { pinMode(DRIVE_PIN, OUTPUT); pinMode(DRIVE_BUT, INPUT_PULLUP); digitalWrite(DRIVE_PIN, LOW); } static inline bool drive_but_pressed() { return !digitalRead(DRIVE_BUT); } static inline void drive_set(const bool& val ) { digitalWrite(DRIVE_PIN, val); }
4. led.h
/** * Pin out */ #define LED_R D6 #define LED_Y D0 #define LED_G D4 #define LED_ON HIGH #define LED_OFF LOW void led_init() { pinMode(LED_R, OUTPUT); pinMode(LED_Y, OUTPUT); pinMode(LED_G, OUTPUT); digitalWrite(LED_R, LED_OFF); digitalWrite(LED_Y, LED_OFF); digitalWrite(LED_G, LED_OFF); } static inline void led_set_r(const bool& val) { digitalWrite(LED_R, (val ? LED_ON : LED_OFF)); } static inline void led_set_y(const bool& val) { digitalWrite(LED_Y, (val ? LED_ON : LED_OFF)); } static inline void led_set_g(const bool& val) { digitalWrite(LED_G, (val ? LED_ON : LED_OFF)); } static inline void led_flash(const int& pin, const int& interval) { bool last_state = 0; uint32_t t_now = millis(); last_state = ((t_now % (uint32_t)interval*2) < interval); digitalWrite(pin, last_state); }
5. sensor.h
#define SENS_PIN D5 #define SENS_DETECTED false #define SENS_UNDETECTED true void sensor_init() { pinMode(SENS_PIN, INPUT); } static inline bool sensor_get() { static int val_count = 0; bool val = digitalRead(SENS_PIN); if(val == SENS_DETECTED) { val_count ++; }else{ val_count = 0; } if(val_count > 20) { val_count = 0; return true; } return false; }
6. state_machine.h
int32_t last_trig = -31000; static inline void st_set_holding() { last_trig = millis(); } static inline bool st_is_holding() { uint32_t t_now = millis(); if( (int32_t)t_now - last_trig < HOLD_SEC*1000 ) { return true; }else{ return false; } }
7. wifi_util.h
/***********************| * WiFI สำหรับ ESP8266 | ***********************/ #include <ESP8266WiFi.h> #include <ESP8266mDNS.h> #include <WiFiUdp.h> #include <ArduinoOTA.h> /************************| * รหัส WiFi ที่ต้องเชื่อมต่อ | ************************/ char* ssid = "Kanuengnit_kiss2G"; char* pwd = "3213213213"; #define ALWAY_CONNECT true /************************| * ตั้งค่า Static IP ตรงนี้ | ************************/ IPAddress local_IP(192, 168, 1, 56); IPAddress gateway(192, 168, 1, 1); IPAddress subnet(255, 255, 255, 0); IPAddress primaryDNS(8, 8, 8, 8); void wifi_ota_init() { ArduinoOTA.onStart([]() { String type; if (ArduinoOTA.getCommand() == U_FLASH) { type = "sketch"; } else { // U_FS type = "filesystem"; } // NOTE: if updating FS this would be the place to unmount FS using FS.end() Serial.println("Start updating " + type); }); ArduinoOTA.onEnd([]() { Serial.println("\nEnd"); }); ArduinoOTA.onProgress([](unsigned int progress, unsigned int total) { Serial.printf("Progress: %u%%\r", (progress / (total / 100))); }); ArduinoOTA.onError([](ota_error_t error) { Serial.printf("Error[%u]: ", error); if (error == OTA_AUTH_ERROR) { Serial.println("Auth Failed"); } else if (error == OTA_BEGIN_ERROR) { Serial.println("Begin Failed"); } else if (error == OTA_CONNECT_ERROR) { Serial.println("Connect Failed"); } else if (error == OTA_RECEIVE_ERROR) { Serial.println("Receive Failed"); } else if (error == OTA_END_ERROR) { Serial.println("End Failed"); } }); ArduinoOTA.begin(); Serial.println("Ready"); Serial.print("IP address: "); Serial.println(WiFi.localIP()); } void wifi_init() { Serial.println("Checking wifi req."); pinMode(0, INPUT_PULLUP); led_set_y(true); delay(2000); if(digitalRead(0) == LOW || ALWAY_CONNECT) { Serial.println("WiFi requested."); WiFi.config(local_IP, primaryDNS, gateway, subnet); WiFi.begin(ssid, pwd); while(WiFi.status() != WL_CONNECTED) { led_set_y(false); delay(100); led_set_y(true); delay(100); } Serial.println("WiFi started ! IP = " + WiFi.localIP().toString()); wifi_ota_init(); }else{ Serial.println("WiFi not requested."); } led_set_y(false); } void wifi_handle() { ArduinoOTA.handle(); }
สังเกตว่าในโค้ดส่วน wifi_util.h จะมีฟังก์ชัน OTA รองรับสำหรับการอัพโหลดไร้สายด้วย เราจึงสามารถอัพโหลดโปรแกรมเวอร์ชันใหม่ๆ ผ่าน wifi ได้โดยไม่ต้องไปเปิดตู้ Control ทุกครั้งครับ สำหรับรายละเอียดเพิ่มเติมสามารถหาอ่านได้จาก บทความ OTA ได้เลย
ในส่วนของการผสมน้ำยาฆ่าเชื้อ เราจะใช้น้ำยา Dettol antiseptic disinfectant ในอัตราส่วน 1 ml ต่อ น้ำ 200 ml ตามสูตรสำหรับการอาบน้ำ ซึ่ง 1 ฝาของน้ำยาขนาด 5L มีปริมาตร 21ml ดังนั้นการผสมน้ำจะใช้ 4200 ml หรือประมาณ 4.2kg ต่อน้ำยา 1 ฝา กรณีของผมใช้เป็นถังเล็ก 10l จึงเลือกใช้เป็น 2 ฝา ต่อน้ำ 8.4kg นั่นเองครับ โดยเราควรวางถังน้ำไว้สูงกว่าปั้มเล็กน้อย เพื่อให้ไม่มีอากาศค้างในระบบท่อ
แต่หากใครไม่ถนัดด้านการเขียนโปรแกรม หรือไม่เคยใช้มาก่อนและไม่ได้วางแผนจะนำไปต่อยอด ก็สามารถใช้ Timer แทน Nodemcu ในการสั่งการหน่วงเวลาที่เปิดปั้มได้เช่นกัน
หวังว่าโปรเจคนี้จะให้แรงบรรดาลใจในการคิดค้นเครื่องมือสู้ภัย Covid-19 มีคำถามหรือข้อเสนอแนะประการใดสอบถามเข้ามาทางไลน์ร้านได้เลยครับ
ธนบดี บุหลันศรีชาติ
ผู้เขียน

BLOG
5 months ago
หากคุณกำลังมองหาโมดูลที่รวมจอแสดงผลและปุ่มหมุนไว้ในชิ้นเดียวสำหรับการควบคุมเมนู การตั้งค่าพารามิเตอร์ หรือการสร้าง UI แบบอินเทอร์แอคทีฟบนโปรเจกต์ ESP32 หรือ Arduino – โมดูลจอ OLED พร้อมปุ่ม Knob ตัวนี้คือคำตอบ! รายละเอียดสินค้า ชื่อสินค้า:โมดูล…

5 months ago
ถ้าพูดถึงบอร์ด esp32 devkit ต่าง ๆ ที่มีพอร์ต USB ให้ใช้ เรามักเห็นพอร์ต USB ที่มีจุดประสงค์เพื่อการอัพโหลดโปรแกรมเข้าไป จนกระทั่งการมาของ esp32-s3 เราพบว่า Third party board หลายๆอันทำออกมามี 2 USB แล้วนักพัฒนาอย่างเราต้องใช้อันไหน เปิดไปใน Tools ขอ…

9 months ago
ESP32 เป็นไมโครคอนโทรลเลอร์ที่ได้รับความนิยมสูงเนื่องจากความสามารถในการเชื่อมต่อไร้สายและประสิทธิภาพการทำงานที่ดี อย่างไรก็ตาม การจัดการพลังงานเป็นสิ่งสำคัญ โดยเฉพาะเมื่อต้องการให้ ESP32 ทำงานได้นานขึ้นโดยใช้พลังงานจากแบตเตอรี่ หลักการคำนวณระยะเวลาใช…

9 months ago
ตัวอย่างโค้ดสำหรับการใช้งาน ESP32 ในการวัดค่า PM2.5 และดึงค่าเวลาจาก NTP Server เพื่อส่งข้อมูลไปยัง หน้าจอ LCD 20x2 Hardware Requirements ชุดสินค้า ชุดทดลองทำเซ็นเซอร์วัดฝุ่น PM2.5 ด้วย ESP32 และ PMS3003 พร้อมหน้าจอแสดงผล หรือ Power supply 9v 2a เซนเ…

10 months ago
ในตัวอย่างนี้จะเป็นการใช้ Library ที่ชื่อว่า TickTwo แทนการใช้ millis() ใน Arduino โดย Library นี้จะช่วยในการคำนวณเวลาและเรียกฟังก์ชันที่ต้องการให้ทำงานเมื่อถึงเวลาที่กำหนดไว้ โดยไม่ต้องใช้ millis() ในการคำนวณเวลาเอง และไม่ต้องใช้ if ในการตรวจสอบเวลา…
 ModuleMore
ModuleMore






E-mail : paheyisoicus@gmail.com
TOP Back to top
